
We use cookies to ensure our website works properly and to personalise your experience. Cookies policy
Department of Pharmaceutics, JNTUK, Kakinada, Andhra Pradesh, India
Nanomaterials are materials with a dimension of 1 to 1000 nanometers, in contrast with traditional drug delivery, which depends on blood circulation to reach the target. The development of devices or robots at the nanoscale that are able to execute complicated operations like actuation, sensing, signalling, information processing, and intelligence is known as nanorobotics. By utilising biological principles, nanomachines can discover new phenomena and be created as programmable molecular robots. These micro/nanorobots can move independently, enabling the delivery of medications to difficult-to-reach locations. This article highlights the application of nanorobots in drug delivery, therapy, and illness diagnosis while introducing their structure and classification. Micro/nanorobots were powered by either endogenous power (chemical reaction energy) or exogenous power (magnetic fields, light energy, acoustic fields, electric fields, etc.). Motile microorganisms are summarised and discussed in terms of the driving forces needed for automotive motion in biological media, biocompatibility, cell-based micro/nanorobots, and DNA origami without the capacity for autonomous movement. As nanotechnology advances, nanobots—one of the most promising uses of nanomedicines—are primarily utilised for the treatment of cancer, CVS, dentrifices, haematology, multiresistant bacterial infections, DNA nanorobotics, surgery, neurology, diagnosis, vascular, gene and cell therapy, etc.
Through efficient use of available energy sources, micro and nanorobots represent a novel class of miniature machines that can move independently in a variety of environments [1].
History : In 1959, Nobel Prize-winning physicist Richard Feynman introduced the idea of using microscopic machines to treat diseases at the molecular level [2].Nanomachines, nanorobots, and nanodevices using nanoelectromechanical systems (NEMS). Computation, command processing, actuation and propulsion, power supply, data communication, programming, interface, and coordination are all essential tasks in nanorobotics[3].These are tiny robotic devices made especially to carry out extremely precise tasks at the nanoscale. They are also referred to as nanoids or nanorobots. They frequently draw inspiration for their designs from biological microbes, particularly bacteria. Carbon is expected to be the primary building material, most likely in the form of fullerene-based nanocomposites or diamond structures. These materials are preferred because of their superior chemical stability, mechanical strength, and heat conductivity. The smooth surface produced by using diamondoid materials for the outer shell of nanorobots reduces the likelihood of triggering an immunological reaction.
Nanorobots can be constructed with nanoscale mechanical parts like motors, bearings, and gears. Depending on the intended use, their specialized components may also be composed of silicon, nitrogen, sulfur, oxygen, hydrogen, and other elements [3]. Both exogenous and endogenous methods be used to develop nanorobots. They can efficiently transport and administer therapeutic agents directly to diseased tissues and increasing treatment effectiveness, this type of targeted delivery reduces systemic toxicity and the unfavorable side effects linked to conventional medication therapies [4].
Ideal Nanorobot Features:
TABLE 1: ADVANTAGES OF NANOROBOTS OVER CONVENTIONAL MEDICAL TECHNIQUES [5]
|
Aspect |
Conventional Medical Techniques |
Nanorobotics |
|
Tissue damage |
Involves incisions that injure tissue layers and take time to heal |
Causes minimal / no tissue trauma |
|
Pain management |
Requires anesthesia, which is painful and temporary |
Reduces or eliminates the need for anesthesia |
|
Success rate in delicate surgeries |
Not always 100% successful (e.g., eye surgeries) |
Higher precision, improving success rates |
|
Risk factor |
Patient’s life depends entirely on the surgeon; high risk if errors occur |
Reduced dependency on manual control; safer and more reliable |
|
Recovery time |
Long recovery period after surgery |
Shorter recovery time |
|
Post-treatment care |
Significant care required |
Minimal post-treatment care |
|
Monitoring |
External monitoring only |
Continuous internal monitoring and diagnosis |
|
Response to changes |
Slower to adapt to sudden medical changes |
Immediate response to sudden changes |
|
Data handling |
Limited predictive capability |
Can store/process data, identify patterns, and predict onset of diseases |
|
Targeting ability |
Less precise targeting of diseased sites |
Can be externally guided/programmed to reach specific locations |
|
Drug delivery |
Generalized delivery with systemic side effects |
Localized drug/cell delivery at specific sites |
|
Biocompatibility |
External implants may not always integrate well with body |
Navigates through natural biological pathways; customizable and durable |
Disadvantages of Nanorobotics:
1. When different nanorobots are inserted to cure different diseases, the clusters may be formed inside the body.
2. Installation cost is quite high[5].
The substructure includes the following [6]
TABLE 2: COMPONENTS OF NANOROBOTS
|
Sr. No. |
Components |
Concise Description |
|
1 |
Shell |
Outer covering that provides structure, biocompatibility, and safety to internal parts. |
|
2 |
Power Source |
Supplies energy through hydrogen fuel cells, glucose metabolism, or external sources. |
|
3 |
Payload |
Hollow compartment carrying drugs or therapeutic agents; releases them at targeted sites (infection/injury). |
|
4 |
Sensors |
Detect biological or environmental signals, such as infections or target molecules. |
|
5 |
Actuators |
Perform physical tasks—movement, drug release, or tissue interaction. |
|
6 |
Communication Systems |
Allow coordination with external devices or between nanorobots. |
|
7 |
Micro Camera |
Miniature camera for real-time visualization and manual navigation in the body. |
|
8 |
Electrodes |
Generate power using blood electrolytes; can destroy cancer cells by producing electric current and heat. |
|
9 |
Lasers |
Burn/block harmful tissues like arterial plaque, blood clots, or tumors. |
|
10 |
Swimming Tail/ Propellers / Fins |
Provide locomotion; manipulator arms or legs aid in mobility and navigation. |
|
11 |
Chemical Sensors |
Detect specific molecules for targeted action. |
|
12 |
Control Software |
Simulates nanorobot movement in fluid environments affected by Brownian motion. |
|
13 |
Swarm Intelligence Techniques |
Algorithms (ACO, ABC, PSO) for group coordination and collective functioning. |
|
14 |
Molecular Sorting Rotors & Nanosensors |
Help in sorting molecules and nanoscale sensing for precision tasks. |
FOUNDATIONS MATERIALS AND METHODS :
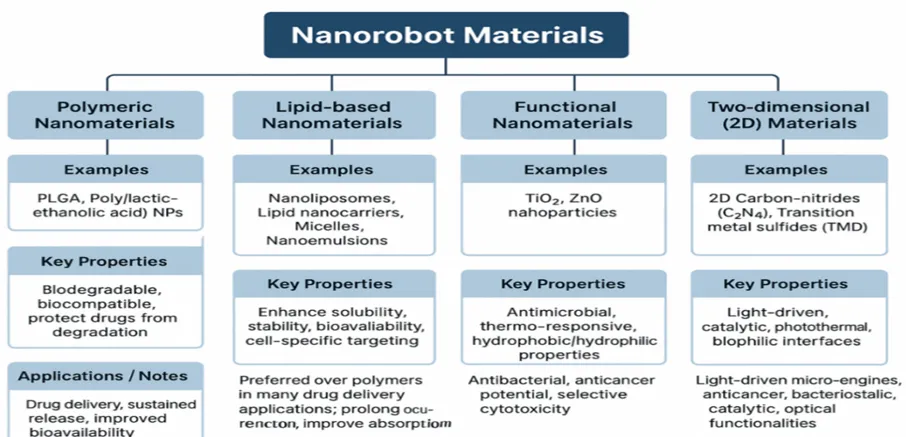
Fig 1 : Tree diagram describing the nanorobot materials
1. Materials :
• The performance of nanorobots, drug delivery effectiveness, and biocompatibility are all directly impacted by the choice of material [2].
TABLE 3: CARRIER STRUCTURES FOR NANOROBOTS [2]
|
Category |
Structure & Composition |
Key Features & Advantages |
Applications / Examples |
|
Lipid-Based Nanocarriers |
Constructed from lipid materials; typical type: liposomes (spherical vesicles, 50–500 nm, 1+ lipid bilayers) |
- Excellent biocompatibility (similar to biological membranes), Can encapsulate water-soluble drugs (inner aqueous core) and lipid-soluble drugs (lipid bilayer), Protects cargo from external environment- Prolonged in vivo lifespan - Surface easily chemically modified for specific functions [2]. |
- First FDA-approved nanomedicine (1995)- Functionalized liposomes (e.g., SLP-encapsulated liposomes) can target the gastrointestinal tract via ligand-receptor interactions - Drug delivery and biomedical applications |
|
Polymer-Based /Dendritic Nanocarriers |
Constructed from macromolecular polymers; may include dendrimers or DNA-based nanostructures |
- High encapsulation efficiency & Controlled and sustained drug release - Functionalizable for targeted delivery & Capable of responding to stimuli (e.g. conformational changes in DNA nanorobots) |
- DNA nanorobots with 3D hollow hexagonal structures (can present cargo upon stimulus) - Cell-specific drug delivery, Advanced disease treatment applications |
Propulsion of Nanorobots:
Nanorobots require energy sources to move autonomously in biological environments. The choice of propulsion method consider the speed, controllability, biocompatibility, and applicability in vivo. Traditional macroscopic batteries cannot be used, so alternative strategies must ensure sufficient power to overcome environmental resistance, such as that in the tumor microenvironment (TME) [6].
Propulsion methods are mainly classified into exogenous (external) and endogenous (internal) driving forces:
TABLE 4: TYPES PROPULSION METHODS
|
Type |
Mechanism / Example |
Key Features |
Pros / Cons |
|
Exogenous Propulsion |
Magnetic fields – Use rotating or oscillating magnetic fields to drive movement. Ultrasound – Acoustic waves induce motion via pressure gradients. Light-driven – Light responsive materials generate movement via photothermal or photocatalytic effects. Electric fields – Electric or electrophoretic forces move charged nanorobots. |
Allows precise external control of speed and direction; can operate in various environments. |
+ High controllability – Requires external equipment; may have limited tissue penetration for light/electric methods |
|
Endogenous Propulsion |
Chemical reactions – Catalytic nanorobots decompose hydrogen peroxide or other substrates to generate thrust. Biological/Enzyme reactions –Enzymes utilize naturally occurring molecules like glucose, urea, or ATP to power motion. Bio-hybrid propulsion – Microorganisms (e.g., bacteria or sperm cells) carry and move nanorobots. |
Exploits internal bodily resources, allowing autonomous operation. |
+ Self-powered; no external device needed – Limited fuel availability; stability and reproducibility challenges |
|
Hybrid/ Multi-modal Propulsion |
Combines exogenous and endogenous forces (e.g., enzyme-driven nanorobot guided by magnetic fields). |
Enhances precision, speed, and responsiveness in complex environments. |
+ Improved navigation – More complex design and fabrication |
|
Other Innovative Approaches |
Chemical gradients – Move along pH, ionic, or concentration gradients (chemotaxis-like). Thermal gradients – Thermophoresis causes motion along temperature differences. Light gradients – Phototaxis-like motion along light intensity gradients. |
Can respond autonomously to environmental cues without external control. |
+ Smart navigation in vivo – Often slower and less controllable than external stimuli |
Design Considerations:
Definition: The core of a nanorobot refers to its central structural and functional unit that enables payload delivery, targeting, and responsiveness to biological cues[6,7].
TABLE 5: NANOROBOTIC CORE: TYPES, USES, AND EXAMPLES
|
Nanorobotic Core Type |
Description |
Uses |
Examples |
|
DNA Origami |
Single-stranded DNA folded into 2D or 3D nanostructures |
Targeted drug delivery; biomarker-responsive |
DNA nanostructures releasing anticancer drugs |
|
Viral Capsids |
Protein shells that protect nucleic acids; undergo conformational changes |
Deliver nucleic acids or therapeutic molecules |
Engineered capsids releasing nucleic acids upon receptor binding |
|
Bioinspired Polymer Nanoparticles |
Natural polymers (chitosan, gelatin, alginate, pectin, dextran, chondroitin) chemically modified |
Nanoparticle drug delivery, especially in cancer therapy |
Chitosan nanoparticles for controlled anticancer drug release |
Nanorobot fabrication has progressed from basic electrochemical techniques to sophisticated template-based and biohybrid methods, allowing for precise control over functionality, structure, and integration with biological systems.
1. Generation of Nanorobots: This strategy made use of straight forward manufacturing techniques and fundamental shapes. Metal salts were electrochemically reduced in uniform nano or microscale pores as part of the production process.
2. Self-Assembly Techniques: This technique uses a layer-by-layer assembly of successively charged materials. Self-organizing polymers can hold catalytic materials in bowl-like structures. Magnetic connections and colloidal bonding are used to create functional nanostructures.
3. Template-Driven Methods: To create non-symmetrical coatings, thin films are applied to templates. Nanorobots are assembled using polymers, metal beads, and a variety of micro-templates modeled after biological systems.
4. Innovative Fabrication Methods: More precise creation of complex nanorobots is made possible by advanced techniques such as rolled-up lithography, glancing angle deposition, and 3D printing. These have limitations on the choice of materials and are typically more costly, but they offer better design options.
5. Biohybrid Nanorobots: These combine synthetic components with living organisms.
Their creation relies on electrostatic self-assembly and noncovalent interactions to bind synthetic materials to particular locations on microbes. They combine engineered features with biological movement.
Nanorobot degradation :
It uses laser direct writing to control the shape of microrobots made of biodegradable polymers. Drug-carrying biodegradable nanorobots have been developed using water-soluble polymers such as polyvinyl alcohol to enable mass production [9]. Magnetic nanoparticles can be mixed with natural polymers like chitosan and gelatin to create biodegradable nanorobots that are guided by magnetic fields and can reach specific defective sites. The released payloads or cells are able to migrate towards the damaged area to perform repair functions as the nanorobots gradually break down in a biological environment[6,7,8].
TABLE 6: Types/ Typical examples of Micro/Nano robotics [6,7,8] :
|
No. |
Nanorobot types |
Key attributes |
|
1. |
Pharmacyte |
Having size of 1 to 2 μm. Molecular markers or chemotactic sensors are employed to guarantee the accuracy of the targeting mechanism. After completing their functions, they can be removed or restored using centrifuge nanapheresis. |
|
2. |
Microchips |
Contain microchips that can transmit electrical signals when they encounter disease-related molecules. Has advantages include their minimal energy requirements, ease of use. |
|
3. |
Respirocyte |
A type of nanorobot that carries oxygen like an artificial red blood cell. The power is achieved through endogenous serum glucose |
|
4. |
Microbivores |
The nanorobot features a flat and spheroidal design intended for use in nanomedicine. It measures 3.4 µm in diameter along its major axis and 2.0 µm in diameter on its minor axis. Its phagocytic ability is nearly 80 times more effective than that of typical macrophages. |
|
5. |
Clottocyte |
They possess an immediate hemostatic effect known as artificial mechanical platelets. Additionally, they carry components that aid in the coagulation process. |
|
6. |
Chromallocyte |
The renovation device will initially evaluate the state by examining the cellular components, activities, and operations. These repair machines have the ability to rejuvenate the entire cell. |
DIFFERENT DRIVING FORCES
At the nanoscale, object behaviour is dominated by low Reynolds numbers and Brownian motion, requiring nanorobots to generate sufficient force to overcome environmental resistance. They achieve motion through energy conversion, transforming magnetic, optical, acoustic, or other energies into kinetic energy for efficient nanoscale operation[2].
1. Exogenenous :
1.1. Micro/Nanorobots Driven by Magnetic Field:
Usually, magnetic propulsion systems employ helical, flexible, or surface-walking structures that resemble bacterial flagella. For controlled navigation, helical nanorobots transform magnetic torque into translational and rotational motion. For instance, Qiu et al. created temperature-sensitive, drug-loaded liposomes in conjunction with an artificial bacterial flagellum (ABF) coated in titanium. The microrobot showed great promise for targeted drug delivery by achieving precise 3D movement and controlled drug release (~73% at 41°C) under rotating magnetic fields. Nanorobots created by Dreyfus et al. have movement controlled by an external magnetic field. These nanorobots provide a solid foundation for magnetic-field-driven actuation in nanorobotics by simulating the flagellar motion observed in bacteria and eukaryotic cells under oscillating magnetic fields[9].
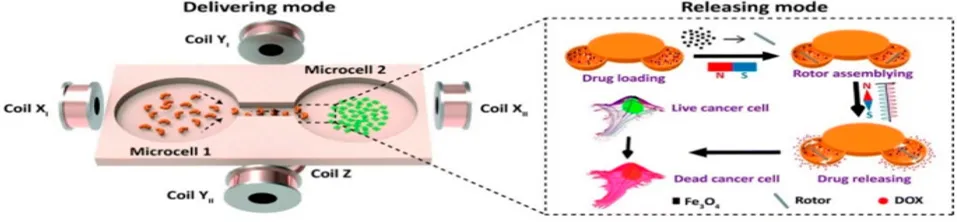
Fig 2: Pine pollen-based microrobot with Fe3O4 magnetic particles and drugs[9]
1.2. Electric Field Propelled Micro/ Nanorobots:
Electric energy, which is often coupled with magnetic fields, is used to move micro/nanorobots precisely and controllably. A nickel coating enables magnetic steering for targeted delivery, while an external high-frequency electric field (0.5–2.5 MHz) induces autonomous movement and cargo manipulation in Janus colloidal systems. Rotating nanomotors based on carbon nanotubes exhibit extremely quick motion through electric-induced water dipole orientation, though their effectiveness in complex biological fluids is still unknown. Pt-based bimetallic nanorods have integrated AC and DC electric fields for speed modulation and 3D directional control, enabling accurate cargo release and transportation [9,10].
1.3. Light-Powered Micro/Nanorobots :
Light-driven micro/nanorobots offer directional motion, superior controllability, and programmability through the manipulation of light's frequency, polarization, intensity, and direction. For instance, Zhan et al. developed an artificial swimmer based on Sb₂Se₃ using cross-aligned dichroic nanomotors that could be controlled by changing light polarization, indicating the potential for customised drug delivery[10,11].
1.4. Nano/microrobots propelled by ultrasound:
Ultrasound-powered nanorobots hold great promise for targeted drug delivery. Gold nanowires are commonly used as carriers and are widely produced via template electrodeposition. A copper sacrificial layer creates a concave cavity that allows for propulsion; ultrasonic waves striking the cavity create pressure, which drives movement. Magnetic fields are also frequently used with ultrasonic propulsion to enhance control and navigation.
Victor et al. created an ultrasonic-powered, magnetically guided Au–Ni–Au nanowire motor that can move in any direction by modulating a magnetic field. The addition of a pH-sensitive PPy–PSS polymer section allowed for customized drug release in acidic environments [10,12].
1.5. Hybrid‑driven nanorobots :
Wang's group at the University of California created rod-shaped nanorobots made of porous metal using electrodeposition. Their porous design allows for up to 20 times higher drug loading than their planar metal counterparts. NIR light triggered the release of the medications, which, when driven by magnetic field-guided ultrasonic waves, efficiently destroyed tumor cells [6].
Beladi-Mousavi et al. created self-propelled Bi-based tubular microrobots for intelligent drug delivery [13]. The outer Bi layer carried the anti-cancer drug DOX, which was then delivered to cancer cells specifically with the aid of a nickel layer that provided magnetic guidance. Using an external magnet to guide the loaded microrobots to an electrochemical device allowed for rapid, on-demand drug release in a matter of seconds [14].
Other power‑driven nanorobots :
Xuan et al. [6,15] Demonstrated that nanorobots could move in a specific direction under NIR irradiation. Au half-nanoshells generated a thermal gradient that supplied self-heating energy to overcome Brownian motion, and the NIR light-powered Janus mesoporous silica nanomotor (MPCM@JMSNM) further utilized the macrophage membrane to enable selective binding to cancer cells.
2. ENDOGENOUS POWER DRIVEN MICRO/ NANOROBOTS :
These nanorobots primarily use chemical or biological processes to propel themselves. Due to their asymmetry and catalyst coating, these systems continuously absorb chemical energy from their surroundings. One popular redox-based propulsion technique is the decomposition of hydrogen peroxide, which generates propulsion when it is easily broken down into water and oxygen by metal, enzyme, or alkaline catalysis. Several nanorobot designs have employed this technique, including vascular polymers, hollow Janus particles [10,16], and bimetallic nanorods [17].
2.1.Biological‑driven nanorobots :
They are made from synthetic materials and living microorganisms, or cells. In biohybrid micro-/nanorobots, microorganisms like bacteria and sperm that move under the influence of flagella could serve as an engine. Furthermore, the unique capacity of sperm to interact with bodily cells may significantly impact the safety and biocompatibility of micro- and nanorobots. A biohybrid robot with four limbs and a 3D-printed magnetic tubular substructure uses a mobile sperm cell as both a drug carrier and a power source[18].
2.2. Micro/Nanorobot Biohybrids:
1. Nanorobots Based on DNA, Enzymes, or Cytomembranes:
DNA is an excellent material for creating complex 3D nanostructures through self-assembly because of its highly specific base-pair interactions and branched junction structures [19].Through complementary DNA hybridization, Maier et al. created magnetic microswimmers, which are biohybrid microrobots driven by a revolving magnetic field, using DNA-based flagellar bundles affixed to magnetic iron oxide microparticles (1μm) [20]. DNA nanorobots have shown great promise in cancer immunotherapy.
Fluid pumps or self-propelled carriers can be created by immobilizing enzymes on particle surfaces. For instance, buoyancy-controlled vertical motion was demonstrated by MOF-based micromotors that used poly(2-diisopropylamino) ethylmethacrylate (PDPA) as a pH-responsive component and encapsulated catalase as an engine. Cell membrane cloaking, which improves in vivo performance through biological and immunological compatibility, has become a potent biomimetic technique to get around the immune clearance and poor therapeutic efficacy of synthetic nanocarriers[21].Membrane-camouflaged micro/nanomotors not only exhibit autonomous motion but also inherit natural cellular functions.
2. Leukocytes biohybrid microrobots :
For targeted immunotherapy, macrophage-based microrobots, or "immunobots," combine the immune-regulatory capabilities of macrophages with the movable mobility of 3D-printed microswimmers [22].These microrobots have been developed as vehicles for precise delivery of anticancer drugs by utilizing macrophage targeting to tumors . More recently, near-infrared (NIR)-responsive precision drug release at tumor sites was accomplished by dual-targeting macrophage microrobots that could be controlled by both external magnetic fields and their own innate chemotaxis.
The robust chemotactic ability of polymorphonuclear neutrophils (PMNs), which make up 40–70% of human leukocytes, is exploited by neutrophil-based systems, also known as "Neutrobots". Neutrophils can act as self-guided biohybrid micromotors with high drug-loading efficiency [23].By internalizing mesoporous silica nanoparticles (MSNs). This allows them to efficiently deliver therapeutic cargos to malignant gliomas in vivo.
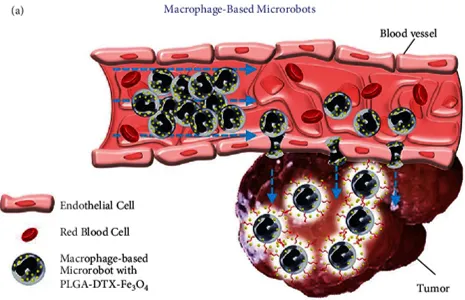
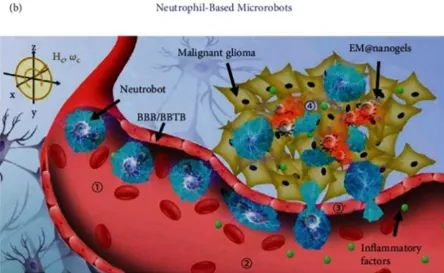
Fig 3: (a) Macrophage-based biohybrid microrobots for active tumour therapy
2.3. Microrobots Using Spermatozoa and Erythrocytes:
Native mouse RBCs have been modified to incorporate magnetic iron oxide nanoparticles (20 nm) in order to produce micromotors that can propel ultrasonic objects and navigate magnetically while preserving their biological characteristics and natural structure. Platelets have also been investigated as effective cargo carriers for the delivery of Specific therapeutics. Spermatozoa have flagella, necessary for propulsion & natural chemotaxis during fertilization known as "spermbots," in which sperm serve as the primary driving element [24].
ROLES IN THE FIELD OF DISEASE TREATMENT
1. Cancer treatment :
1.1. Targeted tumor therapy :
Peng et al. created a nanorobot that can precisely and actively deliver medicines into cancer cells. By encasing adriamycin (DOX) in a tumor-targeting erythrocyte membrane coated on zeolite imidazole framework-8 (ZIF-8) nanoparticles, Karan et al. proposed a cybernetic model that integrates control, communication, and computation in nanoscale mechanical systems [25].
1.2. Photodynamic/Photothermal Therapy :
In this photosensitizer medications build up at tumor locations and release reactive oxygen species (ROS) when activated by light, which kills cancer cells. For applications in photothermal treatment (PTT) and PDT, optically sensitive nanomaterials are becoming more and more popular [26]. Long et al. and Zi et al. independently reported "nanococktail" nanomaterials (DTPR) with 808nm-activated, image-guided dual photothermal properties [27].
1.3. Embolism:
Li et al. created a DNA origami-based nanorobot that can autonomously identify and block tumor-feeding arteries by releasing clot-causing drugs, effectively reducing tumors in animal models. This demonstrates the potential of vascular-occluding nanorobots as a cancer treatment strategy.
2. Cardiovascular diseases :
2.1.Thrombolysis:
By developing a GOx-driven Janus nanomotor with superior biocompatibility and potent thrombus-targeting ability, Fang et al. were able to improve thrombolysis in mice and both static and dynamic models [28]. Recombinant tissue fibrinogen activator-modified magnetite nanoparticles (RTPA-Fe3O4 NPs) were produced by Tang et al. and demonstrated high thrombolytic activity and biocompatibility, allowing for effective clot dissolution at dosages below clinical levels. Prilepskii et al. developed a heparin-crosslinked urokinase–magnetite nanocomposite that enhanced magnetically controlled thrombolytic efficiency and was non-invasive, biocompatible, and reasonably priced.
2.2. Repair of vascular Endothelium:
In order to preserve vessel integrity and avoid vascular diseases, endothelial restoration following vascular injury is essential. Chitosan (CS), Arg-Glu-Asp-Val (REDV) peptide, heparin, and vascular endothelial growth factor (VEGF) were combined by Liu et al. to create a multifunctional system that improved antithrombotic qualities and accelerated the endothelialization of small-diameter vascular grafts [29].
2.3.Vascularisation
In order to overcome this, Zhang et al. created a biocompatible shape memory alloy helical nanorobot that can change its structure when exposed to a revolving magnetic field. Its shape memory-driven propulsion mechanism provides a mechanical method of removing vascular blockages [30].
3. FIGHTING MULTI-RESISTANT BACTERIAL INFECTIONS
A useful tactic against multidrug-resistant (MDR) diseases, nanorobots can precisely distribute antimicrobial drugs in response to stimuli, either autonomously or by external fields [31,32].
3.1.Improving Microbial Distribution:
Nanotechnology-based solutions increase site-specific accumulation, decrease toxicity, and shield medications from degradation, all of which improve antibacterial efficacy. Compared to traditional techniques, these carriers are more effective at co-delivering several medications to infection locations [33,34].
3.2.Elimination of Biofilms of Resistant Bacteria:
Antibiotic resistant biofilm-forming bacteria continue to cause illnesses. Nanorobots based on antimicrobial peptides have eliminated MRSA biofilms by interfering with the replication of bacterial DNA. Halloysite nanotube and iron oxide nanoparticle-based magnetic microrobots have the ability to enter and break biofilms, enhancing the effectiveness of antibiotics [35,36].
4. NANOROBOTS IN SURGERY
Surgeons are able to precisely control nanorobots through computer systems once they have gained access to bodily cavities. The use of Atomic Force Microscopy (AFM) in nanoscale imaging and medicine is essential. AFM can perform microsurgeries at the cellular level and produce high-resolution pictures with tips that are 20 nm or smaller [38].
5. NEUROLOGY USING NANOROBOTICS:
A 40 nm "nano-knife" is one example of a nanoscale tool that enables precise axon manipulation. Nerve reconnection is accomplished by electrofusion or laser-induced cell fusion, while dielectrophoresis, in which polarizable objects are guided by electrical fields, controls axonal motion [39]. Nanorobots aid in the early diagnosis of brain aneurysms, which are potentially fatal intracranial conditions brought on by ruptured blood vessels. These robots can identify abnormal protein expression by tracking nitric oxide synthase (NOS) levels. When NOS exceeds threshold levels (e.g., 100 proteomic units), they transmit a 50 nA signal, providing data on aneurysm location and size [40].
6. HAEMOPHILIA:
Nanorobots can reach blood clots in hemophilia, safely disintegrate them, and stop further blockages. Artificial platelets, or clottocytes, can speed up clotting by up to 1,000 times compared to natural processes, providing quick relief from severe bleeding and open wounds [41,42,43].
7.DENTISTRY/DENTIFROBOTS:
Nanorobotic dentifrices, also known as dentifrobots, are toothpaste or mouthwash-based devices that remove plaque bacteria, clean subgingival areas, and transform debris into innocuous vapors. When ingested, they safely deactivate [43].
7.1. Maintaining Dental Hygiene: Smart nanorobots in mouthwash extract food particles, tartar, and plaque from difficult-to-reach places, protecting the oral flora and averting halitosis and decay [43].
7.2. Cavity and tooth repair: Nanorobots preserve healthy tissue by precisely preparing cavities that are only affected by damaged dentin and enamel. For full tooth regeneration, they also support tissue engineering [42].
7.3. Applications for Orthodontics and Esthetics: By interacting with periodontal tissues, nanorobots allow for quick, painless tooth repositioning and the reconstruction of teeth using materials that resemble natural teeth.
7.4. Analgesic nanorobots, which are controlled by the dentist to prevent pain during procedures, move through dentinal tubules to the pulp in a matter of seconds.
8. NANOROBOTS IN MICROBIOLOGY:
Pairing them with magnetotactic bacteria such as Magnetococcus, M. magneticum increases their mobility. Magnetotactic cocci are preferred for intravascular use due to their higher propulsion efficiency when compared to the smaller marine magnetotactic spirillum(≈500nm) [40].
9. GENE THERAPY WITH NANOROBOTS:
Nanorobots can identify and correct genetic defects by comparing the structures of proteins and DNA with stored molecular data. Damaged DNA strands are repaired by a 50 nm repair channel in the cell nucleus, restoring the cell to normal function. This approach may be used to treat cancer, viral infections, and arteriosclerosis [41-44].
10. DNA NANOROBOTS :
These are programmable nanoscale devices that use controlled state changes to carry out tasks and deliver therapeutic payloads [45]. Stable three-dimensional structures are created by folding long strands with short "staple" strands using DNA origami [46,47,48]. Precise transport and localized motions like opening, closing, extension, and rotation are made possible by these nanodevices . Applications include cancer treatment with selective apoptosis and reduced chemotherapy side effects [50], targeted drug delivery via aptamer "locks" [49], and biosensing of pollutants or environmental cues using engineered proteins or light-responsive DNA [51].
11. DIAGNOSE AND TREAT TISSUE METABOLIC DISORDERS:
In Diabetes by using nanobioelectronics can get warnings when blood glucose levels Surpass 130 mg/dL [52,53,54,55]. And in kidney Disease [56], Gout[57] , Tissue Reconstruction disorders [58] , have the ability to heal damaged nerves and spinal tissues [59,60].
FUTURE PERSPECTIVES :
Nanorobotics has a potential to revolutionize medicine and technology, enabling targeted therapies, real-time diagnostics, minimally invasive interventions. With advances in AI, smart sensors, biocompatible designs, could also drive personalised medicine, gene therapy, environmenetal applications, in healthcare & industry through scientific research with enhanced precision and efficiency. Future advancements in nanorobotics are shifting from passive carriers toward autonomous, self-propelled "nanosurgeons" capable of navigating complex biological barriers. Key breakthroughs include urea-powered "Urobots" and magnetic helical nanoswimmers that actively penetrate dense tumor tissues and biofilms, bypassing the limitations of simple diffusion. Furthermore, the integration of DNA origami logic circuits and bio-hybrid leukocyte shells enables "closed-loop" systems that autonomously sense molecular biomarkers—such as glucose or inflammatory cytokines—to trigger precise, site-specific drug release. Moving forward, the focus will transition to AI-driven swarm coordination and Quality by Design (QbD) frameworks to standardize the manufacturing of these mechanically active therapies for reproducible, large-scale industrial production. As a novel targeted drug delivery systems the self destructive, size adjustable nanorobots plays a significant role in future [61-66].
CONCLUSION
As the technology developing day by day. The drug delivery systems also undergoing several modification to increase their therapeutic efficacy by targeted novel advanced drug delivery systems. In this case the nanorobotics is redefining the landscape of medicine, offering precise, controlled, and targeted interventions at the nanoscale. Having versatile types, innovative propulsion stratergies, and tailored mechanisms, and more useful in fields like surgery, dentistry, neurology, microbiology, gene therapy and as a DNA nanorobotics more useful in precise drug delivery & as a biosensors for disease diagnosis and treatment. By combining active navigation with real-time molecular sensing, these platforms bypass traditional barriers like dense tumor tissue and systemic toxicity. As Quality by Design (QbD) and AI-driven swarm intelligence move these technologies from the lab to industrial scale, nanorobotic systems will transition targeted therapy into a proactive, mechanical-medicinal intervention that maximizes efficacy while virtually eliminating off-target side effects. Their application as a drug delivery systems marks a revolutionary leap leading therapies that are more efficient, personalised, promising a future where disease is treated not just with medicine, but with intelligence at the nanoscale.
REFERENCES



Saroja Kudipudi, Vinay Kumar Dangeti, Srinivasa Reddy Karri, Harini Dara, Satya Sri Kaladi, Nanoscale Marvels: Revolutionary Nanorobotic Drug Delivery Systems for Thernostic Applications in Complex Diseases, Int. J. of Pharm. Sci., 2026, Vol 4, Issue 6, 4808-4824. https://doi.org/10.5281/zenodo.20752679
 10.5281/zenodo.20752679
10.5281/zenodo.20752679